
Dates et lieu
Du 16 au 18 octobre 2019
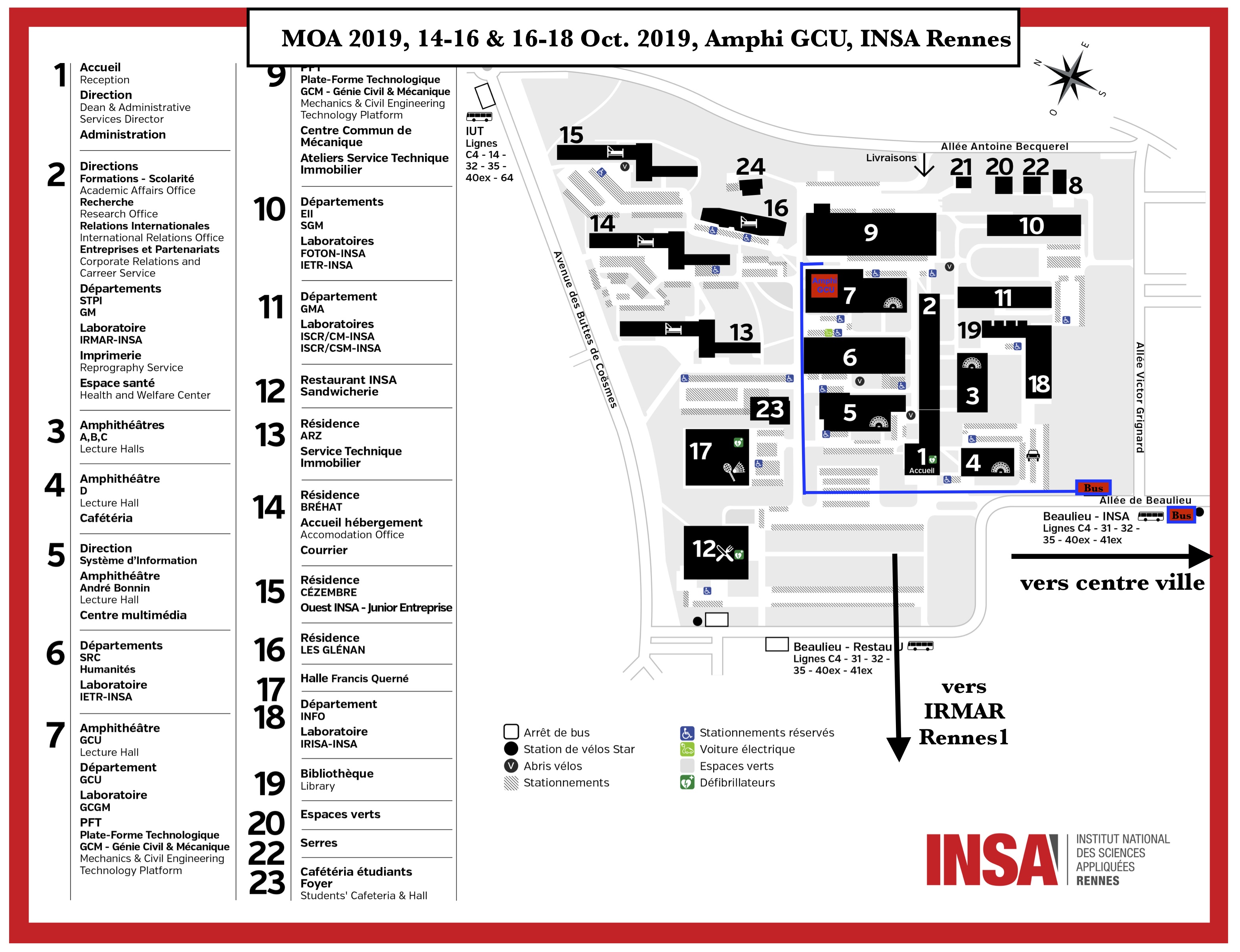
Amphi GCU, INSA Rennes
20 Avenue des Buttes de Coësmes, 35000 Rennes, France
Présentation
Ces journées annuelles du GdR MOA constituent un moment fort de l’activité de notre groupe. Ce sera l’occasion de faire le point sur les avancées récentes en optimisation et leurs applications. Mais ce sera surtout une opportunité pour vos étudiants en thèse de présenter leurs travaux à la communauté. Des aides financières pourront être accordées aux doctorants qui proposeront un exposé.
Conférenciers invités
- Marianne Akian (Ecole Polytechnique, INRIA)
- Michel Crouzeix (Université de Rennes 1)
- Serge Gratton (ENSEEIHT, Toulouse)
- Gabriel Peyré (DMA, ENS Paris)
Comité scientifique
Comité d’organisation
- Aziz Belmiloudi (IRMAR-INSA)
- Mériadec Chuberre (IRMAR-INSA)
- Mounir Haddou (IRMAR-INSA)
- Olivier Ley (IRMAR-INSA)
- Patricia Soufflet (IRMAR-INSA)
- VU Duc Thach Son (IFPEN)
Programme
Les conférences commenceront le mercredi 16 octobre à 14h et se termineront le vendredi 18 octobre à 12h. Ces journées seront précédées d’un mini-cours qui se déroulera du lundi 14 octobre à 14h au mercredi 16 octobre midi.
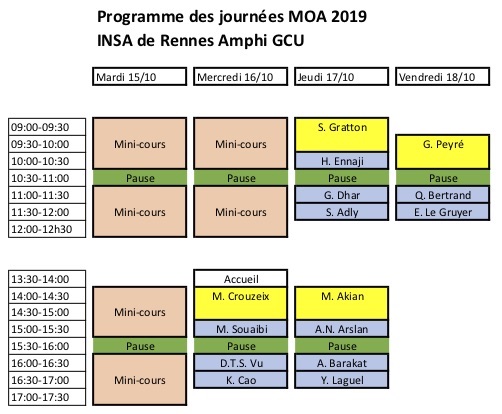
Télécharger le programme au format PDF.
Mini-cours
Un mini-cours sur le thème « Nonsmooth Systems: Models, Numerics, Stability and Control » se déroulera du mardi 15 octobre 9 h au mercredi 16 octobre 12 h sur le même lieu.
Télécharger le résumé du mini-cours au format PDF.
Intervenants : Vincent Acary (INRIA Rhône-Alpes) , Samir Adly (XLIM) et Aneel Tanwani (LAAS Toulouse).
- Mathematical Backgrounds and Existence Theory (3 hours) : Tuesday morning In this first part, we will provide some basic concepts from convex analysis, nonsmooth analysis and Lyapunov stability theory as well as some existence results that will be useful throughout this minicourse. We will also give an overview of some mathematical models that fit into the domain of nonsmooth dynamics. The main purpose is to give a quick but comprehensive snapshot of other classes of nonsmooth systems that can or cannot be captured by the models studied deeply in this minicourse.
- Numerics and Simulation Tools (3 hours): Tuesday afternoon In this second part, we will present the numerical methods and the simulation of the nonsmooth dynamical systems. Typical examples of such dynamical systems are the mechanical systems with unilateral constraints, (contact), Coulomb’s friction and impacts such as masonry buildings, circuit breakers, robotic arms, the electrical circuits with ideal components or the sliding mode control applications. The talk will be mainly focused on Linear Complementarity Systems that model electrical circuits and the concepts of solutions that can be approximated: $C^1$ solutions, absolutely continuous solutions or solutions of bounded variation.
The numerical methods will be illustrated on the platform SICONOS: http://siconos.gforge.inria.fr for modeling and simulating nonsmooth dynamical systems in C++ and in Python. - Stability and Control (3 hours): Wednesday morning. Motivated by the practical aspects of using nonsmooth systems in practical applications, this part of the course will address control related properties. In this regard, we will start with the notion of stability for nonsmooth dynamical systems, and discuss sufficient conditions using Lyapunov functions. We will in particular focus on complementarity systems and see how passivity-like conditions can be used, not only for proving existence of solutions, but also for proving asymptotic stability of the system.
Moving away from the analysis part, we will address some design related questions as well. The first question is to design controllers that can track a desired trajectory within the framework of nonsmooth systems. Sufficient conditions for design of such regulators is presented.
Another instance of the design problem is the synthesis of state estimators for nonsmooth systems. This time, the estimator to be designed is such that it asymptotically tracks the state trajectory of a nonsmooth system. Examples will be provided to illustrate proposed methods.
Informations pratiques
Lieu de la conférence : Amphi GCU, INSA de Rennes, Campus de Beaulieu
Bus de ville STAR pour rejoindre le campus Beaulieu-INSA
- Centre ville / Campus INSA : Prendre la ligne C4 direction ZA Saint-Sulpice (ou ligne Express 40 moins fréquente) aux arrêts République ou Musée des Beaux Arts (Centre Ville) et descendre à Beaulieu INSA.
- Gare de Rennes / Campus INSA : Soit prendre le bus direct (attention : peu fréquent) 41 (Gare de Rennes / Beaulieu INSA), soit prendre la métro à la gare de Rennes (direction Kennedy), descendre à République et prendre le bus (cf. plus haut), soit marcher de la gare de Rennes à l’arrêt Musée des Beaux Arts (remonter l’avenue Janvier, 5-10 minutes de marche, voir la carte) et prendre le bus (cf. plus haut).
- Remarque : Centre Ville / INSA : trajet d’environ 20 minutes en bus.Il est possible d’acheter le ticket dans le bus (prix: 1,50 €). La ligne C4 est la plus pratique: un bus toutes les 8 minutes environ durant la journée.
Suggestions d’hôtels
- Hôtel Astrid**
- Hôtel Atlantic**
- Garden Hôtel**
- Hôtel Le Bretagne**
- Hôtel Le Sévigné***
- Hôtel Nemours***
- Hôtel Richemont**
- Apparthôtel Adagio Access Rennes
Plans

Inscription
- Date limite d’inscription : vendredi 4 octobre 2019.